全国首个智慧弹性停车系统破解“停车之痛”
近期,“弹性交通系统信息物理建模与评估理论方法研究”项目,在停车场景中实践弹性交通相关理念,在上海金鼎莫比乌斯环公园地下停车场构建了全国首个智慧弹性停车系统,切实提升了区域停车效率与管理效能。
弹性(Resilience),强调了交通系统在面对外界扰动时的抵抗、吸收、适应和恢复能力。同济大学交通运输工程学院杜豫川团队把握“弹性交通”这一热点,依托团队多年来在交通基础设施性能感知、智能决策分析等领域的研究成果积淀,构建形成弹性交通信息物理系统(CPS-T)通用理论体系。
弹性交通系统(Resilient Transportation Systems)是具有状态可感知、能力可伸缩、网络可重构等特征的新型交通系统。该系统为常态波动下可靠稳健、异常冲击下快速恢复的新一代交通基础设施规划设计、运行管理、更新再造树立了新标杆。
“弹性交通系统信息物理建模与评估理论方法研究”项目负责人杜豫川向上海科技解释了弹性交通系统的特点。
“在车路协同等相关技术的赋能下,外部扰动或冲击发生后,弹性交通系统能以更短的时间,或者在不需要外部调控的情况下,就快速恢复到原来的水平,满足出行者高效、畅通的通行需求。”
状态可感知、能力可伸缩、网络可重构是构建弹性交通系统的核心特征。该项目团队首先基于多源手段实现不同层次、不同维度交通变量的全域感知,构建弹性交通数字孪生底座模型。
“在此基础上,通过智能驾驶技术压缩车头时距,通过网联设备动态组织交通,实现道路通行能力的动态伸缩,适应不同程度的交通需求变化。”杜豫川进一步介绍。
另一方面,依据交通运行态势分析与预测,动态调整交通网络结构,减少常态化交通拥堵,提升非常态下的自恢复能力。
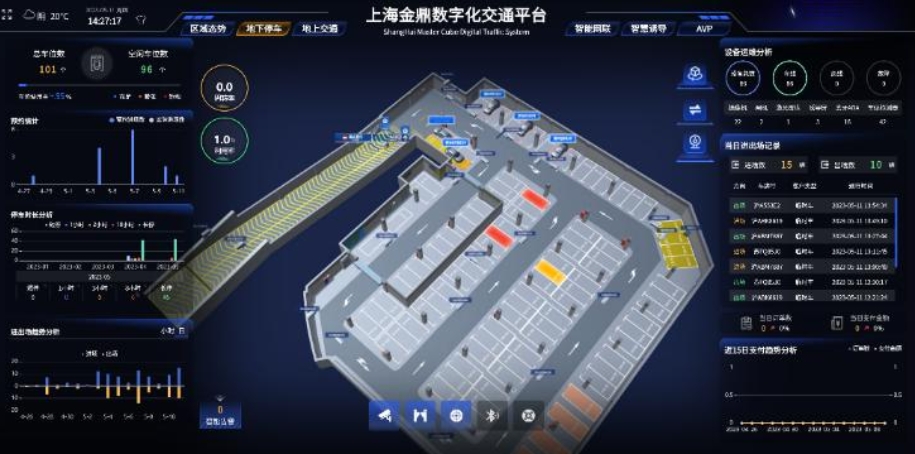
“针对金鼎莫比乌斯环公园地下停车场,我们构建了数字底座及网联可变的停车设施。”杜豫川说。
首先,通过全息感知与数字孪生技术,团队建立数字化交通平台支撑停车场态势推演与动静交通协同管控。在此基础上,团队运用新兴的可变标志标线和增强现实技术,动态改变停车场内交通组织与进出场车辆流线,实现了“自动适应早晚高峰和平峰的停车进出需求”。
与此同时,团队通过智能交互机器人,构建了群智协同的安全管控系统,保障弹性交通组织在信号切换时对车辆的有序指挥。
这种弹性交通方案让更加舒适、便捷的停车出行体验成为现实:早晚高峰进出停车场时,停车场道闸可以依据车辆排队情况自动改变方向,灵活地增加进口或出口车道数,最大限度缩短驾驶员在出入口的排队时间。
值得一提的是,弹性交通系统还可以为驾驶员合理规划并推荐停车场进出路径及汇入时间,减小道路车流与停车场进出车流的相互影响,确保车辆可以最快速度进出区域。
随着智能网联、自动驾驶等相关支撑技术的发展,车路协同弹性交通信息物理系统将成为未来交通新模式。杜豫川告诉记者,信息物理系统(Cyber-Physical System, CPS)是集成计算、通信与控制于一体的新一代智能系统。
信息物理系统可通过信息空间(Cyber Space)和物理空间(Physical Space)各要素的映射和互操作,建立实时、动态、闭环的协同控制机制,为解决综合交通系统弹性提升难题提供了新的支撑。
该系统可利用云计算、大数据仿真、交通智能体等技术,精确预测推演出行者的行为,协同物理与信息空间设施,动态响应交通需求变化,迭代生成最优控制方案,实现交通资源的智能分配与管理。